- Intro to GPS
- Overview
- Global Navigation Satellite System (GNSS)
- NAVSTAR GPS
- US military
- 24 satellites (= SV)
- GLONASS - Russia
- [Galileo - Europe & BeiDou - China]
- How It Works
- surveying: triangulation/ intersection; navigating: resection & trilateration
- analogy: ripples & time
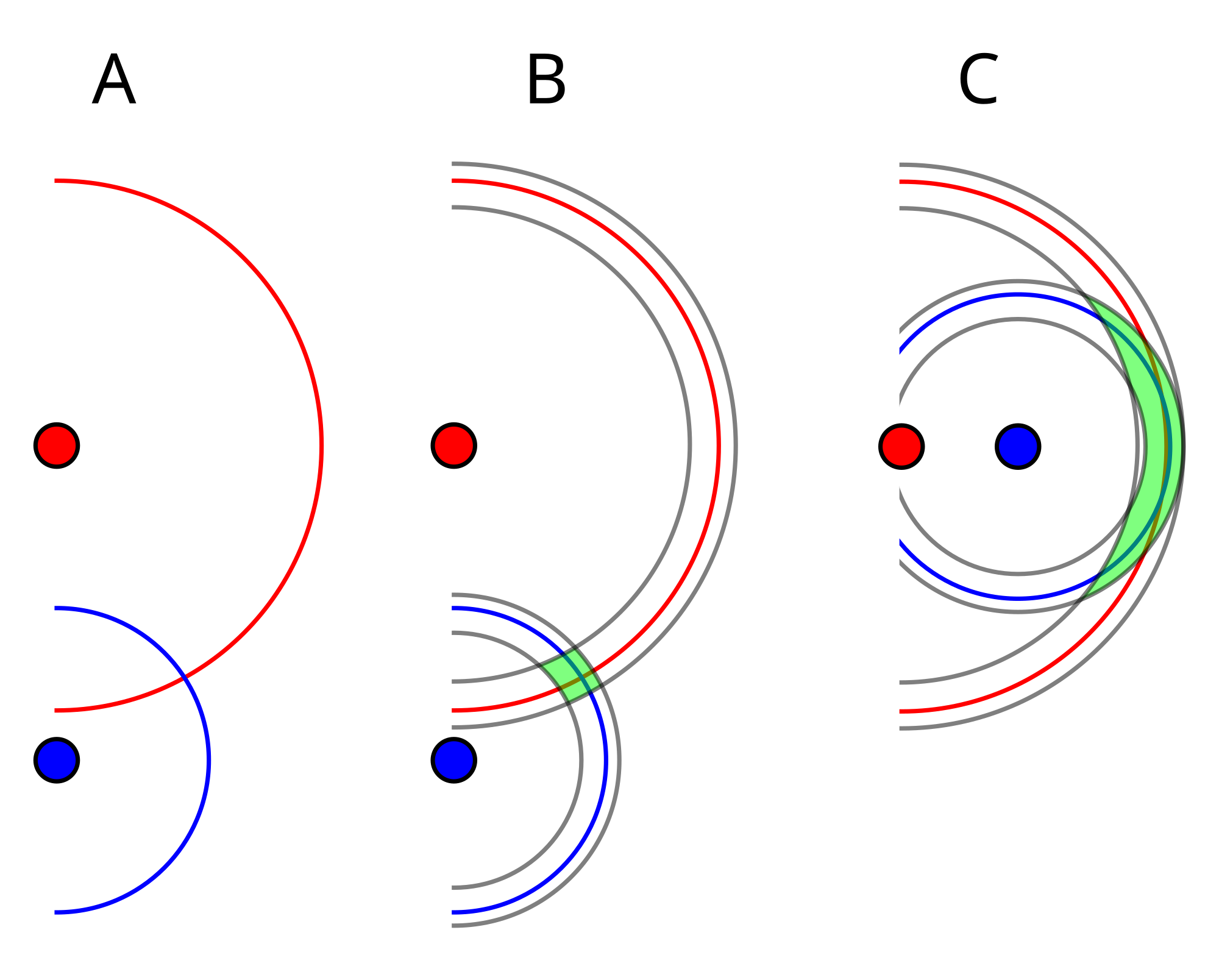
- 1 ripple = circle of possibilities
- 2 ripples = 2 locations (intersection)
- 3 ripples = 1 location
- satellites (SV)
- 1 SV = sphere of possibilities
- 2 SV's = circle of possibilities
- 3 SV's = 2 locations ... 1 usu. ridiculous
- but we need 4 SV's ...
- consider triangulation ...
- ... only really need 2 angles (bearings)
- ... purpose of the 3rd bearing?
- same for GPS
- ... we need a 4th because ...
-
- stereo with 2 speakers far apart
- stand by one speaker, delay with sound from 2nd speaker
- delay due to distance for sound to travel
- pseudo-random code & time
- pseudo-random code
- long digital code emitted from SV
- each SV has it's own code ("song", e.g. Shoot to Thrill)
- receiver has all codes (all "songs = greatest hits album)
- SV & receiver emit code ("play song") at exact same time
- Time Distance
- receiver compares incoming code (song) with it's own
- calculates time diff.
- time diff * speed of light = distance
- distance = radius of sphere
- Exact time measures are critical
- time for signal to reach earth is ~0.06seconds
- speed of light
- 300,000 km/ sec
- 300,000,000 m/s
- ... 0.001 sec = 300,000 m
- ... 0.000001 sec = 300m
- ... atomic clocks
-
- User
- GPS units we use (iPad to Trimble)
- you get what you pay for
-
- 24 SV's - 6 orbits with 4 SV's
- high orbit (20,000 km)
- each SV has 2 orbits / day
- solar powered - low powered transmissions ...
- ... pseudo-random code
- each SV has a unique code
- GPS unit receives these codes
-
- monitor SV's location & health (clocks)
- send ephemeris data to SV's
- thus SV's transmit
- pseudo-random code
- updated info on their true location (ephemeris)
- Sources of Error
- Clock error (1-2m)
- Ephemeris (2-3m) ... vs almanac
- Receiver (0.5m)
- Ionosphere (5m)
- Troposphere (0.5 m)
- Multi-path (1m)
- PDOP (position dilution of of precision) (factor of <5 = good)
- Differential Correction
- eliminates errors!
- stationary unit & roving unit
- error correction for stn. unit gets applied to roving unit - use same SV's and time of day
- post survey correction OR real time correction
- Trimble GPS --> GIS --> iPad (geo-pdf)
-
- Real Elev. = GPS Elev - correction
- if correction is -, then it's added